 浮思特科技
浮思特科技

 新聞資訊
新聞資訊 知識專欄
知識專欄 電動汽車(EV)的決定性特征可能是其電池和電動牽引電機,但它們需要一個同樣重要的第三個元素:牽引逆變器。牽引逆變器使電動汽車的電池能夠與電動機配合工作,將電池的直流電轉換為驅動電機的交流電。
盡管電動汽車市場已經牢固建立,但電動汽車技術還遠未成熟。電動汽車的性能、可靠性和安全性仍有改進的空間,汽車行業依然在積極追求這些改進。雖然電池和電機技術備受關注,但牽引逆變器的創新也同樣重要。

最近推出的牽引逆變器門極驅動器,首次可以根據電動汽車的運行條件在多個預設電流值之間切換;換句話說,這些門極驅動器提供了動態門極強度。NXP的GD3162就是其中的一個早期例子。
改變門極強度使得逆變器控制算法能夠根據電機的當前狀態優化逆變器功率器件的開關速度。例如,當環境溫度非常低(這會影響功率器件的開關速度)或在具有再生制動功能的車輛中(這會增加總線電壓并導致器件應力過大的情況下),這種優化尤為重要。
主要的好處是電動汽車的整體效率得到了提高,而NXP的創新還提供了強大的功能安全解決方案,同時改進了典型硬件設計標準以保護功率器件。至于如何利用這種效率改進,取決于汽車制造商的選擇,但例如,OEM可以利用這種改進來在一定程度上增加車輛的續航里程。
門極驅動器
電動汽車的牽引逆變器必須提供從80千瓦到超過200千瓦的高功率水平,能夠承受高溫,并且要輕量化。
牽引逆變器中的門極驅動器驅動逆變器的功率器件,傳統上是硅IGBT,但越來越多地使用碳化硅(SIC)MOSFET。功率器件是將電池的直流電轉換為電機交流電的開關。

圖1
電動汽車的牽引逆變器通常包含六個獨立的門極驅動IC和六個功率器件,每相三相交流電機各兩個(見圖1)。門極驅動器——包括門極強度指令——通常由牽引逆變器的微控制器管理。
為了可靠地限制峰值電流以充電或放電門極,通常會包括電阻器。傳統上,特定值已固定,以防止最壞情況下的過電壓,從而在更名義的條件下留下潛在的能量節省。
動態門極強度
然而,改變門極開啟或關閉速度的能力對功率器件和電機有許多潛在的有利影響。
功率開關特性良好,但車輛會遇到許多影響功率開關電氣性能的條件。部分列表包括電機電流、電池/總線電壓和功率器件溫度的變化。調整門極驅動電流調節了特定條件下的開關事件(能量),這對于在所有條件下最大化效率是無價的(見圖2)。

圖2
如果能夠根據駕駛條件選擇開關行為——如果動態門極強度是一個選項,逆變器(和車輛)的性能可能會更高效。
NXP通過在其門極驅動器中集成額外的引腳提供了這一選項。NXP GD3162門極驅動器有兩個用于開啟路徑和兩個用于關閉路徑的引腳,可以獨立操作。它提供了高達大約10A或高達大約20A的輸出選擇,以及使用兩者共同提供高達大約30A的第三選項。為什么是“大約”?實際上,OEM或系統設計師可能希望包括一個限流電阻,以限制電流,使得電流值低于10A、20A或30A,這取決于OEM的偏好和其他系統約束。
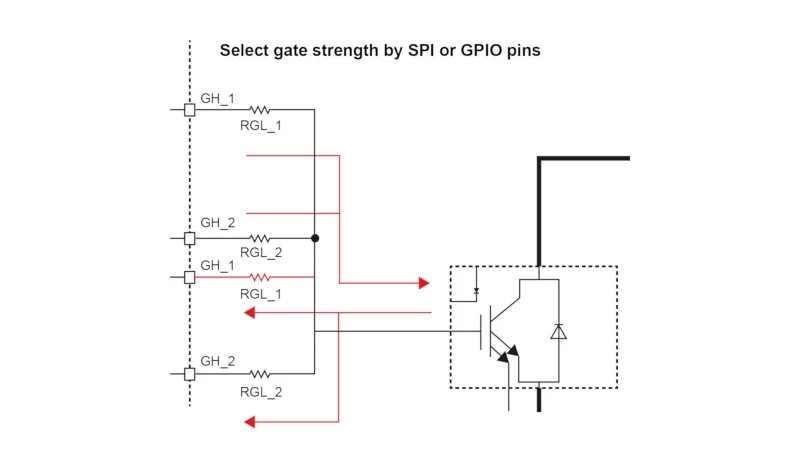
圖3
門極強度可以通過數字輸入引腳或SPI指令來控制(見圖3)。無論哪種方式,客戶都可以根據需要驅動其功率器件。通過如此廣泛的可能電流范圍驅動門極,GD3162甚至可以驅動多個設備或并聯的芯片。
使用GD3162設備,所需的門極強度可以在電機旋轉時實時命令和執行。
效率
功率器件可能會因過度電壓應力而損壞。盡管汽車電子元件被設計為在寬溫度范圍內工作,但只要有可能限制汽車IC(包括越來越先進的門極驅動器)的熱負荷,依然是明智的。
門極驅動電阻的設計通常從檢查最壞情況條件(如最大負載、最大電壓)開始。目標是在這些條件發生時提供足夠的電阻以提供保護。
這確實最小化了潛在的損害,但最壞情況條件本質上是不常見的。增加一個提供動態門極強度的門極驅動器,如NXP GD3162門極驅動器,可以在更典型(更輕)的條件下運行在門極強度設置。
系統連續評估多個系統因素(電流、電壓、溫度),并始終控制門極強度。它在OEM指定為典型條件最優的一個設置下運行,當非典型條件發生時自動切換到更適合的設置,然后在條件恢復正常時動態返回。GD3162門極驅動器為系統集成商提供了更多控制如何最好地保護功率器件的能力。在更適合典型操作模式下的效率提升可能是顯著的。
浮思特科技專注功率器件領域,為客戶提供igbt、IPM模塊等功率器件以及MCU和觸控芯片,是一家擁有核心技術的電子元器件供應商和解決方案商。
